
در این مقاله قصد داریم که از سیر تا پیاز نحوه عملکرد و چگونگی کار یک خودرو خودران و جایگاه فعلی آن در خودروسازی و برنامه آتی شرکتهای توسعه دهنده آن بحث کنیم. با آکادمی اُتکس همراه شوید.
یک خودرو خودران، به خودرویی گفته میشود که بتواند ویژگیهای یک خودرو سنتی را داشته باشد و علاوه بر آن انسان یا کالا را به صورت خودکار ترابری کند. سیستم هدایت یک خودرو خودران با ادراک محیط اطراف و بر اساس پویایی آن، سیستم را به صورت ایمن هدایت و ناوبری میکند. جایگاه یک خودرو خودران با توجه به نیاز دنیای خودروسازی در شکل زیر نشان داده شده است. این شکل برنامه آتی شرکت مگنا به عنوان شرکت پیشرو در طراحی سیستمهای کنترلی خودرو است. همانطور که مشاهده میشود تحقیقات انجام شده برای نیل به خودروهای خودران سبب ایجاد سیستمهای کمکراننده شده است. از منظر دیگر نائل آمدن به یک سیستم کنترلی کامل خودرو بدون بررسی سیستمهای کمکراننده مختلف و همچنین به موازات آن استفاده از بزرگراههای هوشمند بی معناست.
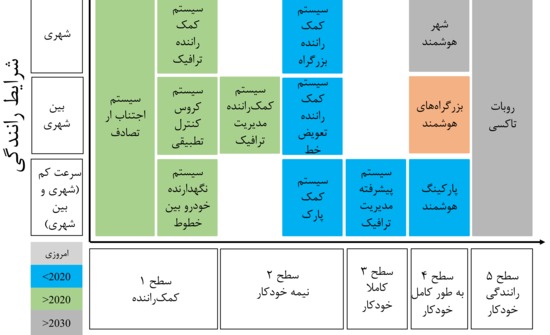
به طور کلی جایگاه سیستم خودرو خودران در سطح پنج خودکارسازی و رانندگی کامل خودرو وجود دارد که با توجه به این برنامه پیشبردی، پیشبینی شده است که بعد از سال ۲۰۳۰ به صورت کامل پیادهسازی شود. به طور کلی سیستم هدایت یک خودرو خودران از چهار مرحله اساسی تشکیل شده است. این مراحل به صورت شماتیک در شکل زیر نشان داده شده است. بخش اول مربوط به سیستم بینایی و ادراک محیط جهان بیرون خودرو میباشد. بخش دوم شامل سیستمهای تصمیمگیری است که بر پایه اطلاعات ورودی سیستم ادراک نوع مانور و عکسالعمل سیستم هدایت نسبت به آنچه در محیط اتفاق میافتد را تعیین میکند. بخش سوم مربوط به طراحی مسیر مانور یا عکسالعمل هدایت از قبیل افزایش یا کاهش سرعت میباشد که با استفاده از سیستم تصمیمگیری و بر اساس بروزرسانی اطلاعات محیطی و با از استفاده از سیستمهای هوشمند مسیر مورد نظر را طراحی مینماید. بخش انتهای قانون کنترلی است که بر اساس آن مسیر با دستور مطلوب طراحی شده برای مانور مورد نظر را انجام دهد. در این بخش به توضیحات کوتاهی از عملکرد هر یک از مراحل میپردازیم.
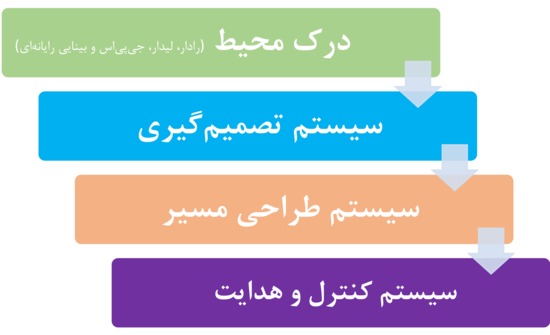
بخش اول: درک محیط
خودرو خودران با استفاده از تجهیزات مختلفی از جمله رادار، لیدار، جیپیاس و بینایی ماشین و با استفاده از تکنیکهای همچون پردازش تصویر، شبکههای عصبی مصنوعی، الگوریتمهای فرا ابتکاری و دادهکاوی این دادههای مختلف با جهان بیرون ارتباط برقرار میکند. بینایی ماشین شامل روشهای مربوط به دستیابی تصاویر، پردازش، آنالیز و درک محتوای آن است. این سیستم بر تصاویر دنیای بیرون را به عنوان ورودی دریافت و دادههای عددی یا سمبلیک را به عنوان خروجی تولید مینماید. این سیستمها با الگو برداری از سیستم بینایی انسان در رایانه شبیهسازی شده است. دیگر تجهیزات مورد استفاده در این بخش سامانه موقعیت یاب جهانی یا جیپی اس است که متشکل از ۲۴ ماهواره است که زمین را دور میزند و در هر مدار ۴ ماهواره قرار دارد. راکتهای کوچکی نیز ماهوارهها را در مسیر صحیح نگاه میدارد. این ماهوارهها از محاسبات ریاضی سادهای برای پخش اطلاعات استفاده میکنند که به عنوان طول و عرض و ارتفاع جغرافیایی، توسط گیرندههای زمین ترجمه شدهاند. دیگر سیستم مورد استفاده شامل لیدار است. لیدار یکی از فناوریهای سنجش از راه دور است که از طریق روشن کردن هدف با لیزر و تجزیه و تحلیل نور منعکسشده، فاصلهها را اندازهگیری میکند. دیگر تجهیزات مورد استفاده در این بخش شامل رادار است که رادار، یک دستگاه رادیویی است که برای مشاهده جسمها و اندازهگیری برخی ویژگیهای آنها بوسیله موجهای رادیویی بکار میرود. مهمترین بخش سیستم ادراک محیط در خودرو خودران شامل داده کاوی دادههای بدست آمده توسط تجهیزات مختلف است. سیستم دادهکاوی با ادغام تصاویر پرداز شده، فواصل اندازهگیری شده توسط لیدار و همچنین استفاده از جیپیاس و رادار، ورودی مورد نیاز سیستم تصمیمگیری را به صورت دادههای عددی و سمبلیک فراهم میآورد.
بخش دوم: سیستم تصمیمگیری
سیستم پیشرفته تصمیمگیری با ارائه الگوریتمی بر اساس خروجی دادهکاوی سیستم ادراک خودرو تعیین میکند که خودرو در کدام مانور، خط و ...، و با چه سرعتی حرکت کند. تصمیمگیری و الگوریتم تعیین مسیر مانور با استفاده از شبیهسازی بهینه کنترل سیگنالهای طولی و عرضی خودرو امکانپذیر خواهد بود. سناریویهای مختلف تصمیمگیری دارای برخی قیود مختلف است که قیود مشترک این الگوریتمها را میتوان بدین صورت نوشت:
⦁ نگهداری خودروی اصلی در روی خط مرزی بین خطوط
⦁ نگهداشتن خودروی اصلی در سرعت مطلوب
⦁ جلوگیری کردن از تصادف با خودروهای اطراف
⦁ حفظ خودرو در مرزهای جاده
⦁ احترام به طراحی فیزیکی و محدودیتهای خودرو
بخش سوم: سیستم طراحی مسیر
در این بخش هدف پیدا کردن مسیری است که خودرو روی آن با توجه به قسمت تصمیمگیری مسیری را تعیین کند. در واقع الگوریتم تعیین مسیر باید قادر به طراحی دوباره مسیری جدید باشد به طوری که اگر شرایط محیط عوض شد و قسمت تصمیمگیری تصمیم جدیدی اتخاذ کرد قادر به تولید مسیری جدید بر اساس پارامترهای خودرو و جاده باشد. در واقع الگوریتم مناسب برای طراحی مسیر باید به گونهای باشد که نسبت به شرایط ترافیک جاده، نوع مسیر را دوباره طراحی و تعیین نماید. در تعیین این مسیر از روشهای مختلف استفاده میشود و همچنین مسیر شامل توابع چند جملهای، مثلثاتی و .. میباشد. روشهای استفاده شده در این بخش در اکثر موارد شامل الگوریتمهای بهینهسازی، زنجیره مارکوف، شبکههای عصبی مصنوعی، نقشه ریسک و همچنین استفاده از روشهای مبتنی بر تقابل راننده یا مدل راننده و روشهای دیگر از این قبیل است که بتواند بر اساس تابعی ریاضی مبنا، مسیر مورد نظر را طراحی نماید. این مسیر به عنوان ورودی کنترلر برای بخش هدایت فرمان خودرو مورد استفاده قرار میگیرد. همچنین با استفاده از سیستم کروز کنترل پیشرفته که بر اساس میزان اصطکاک سطح و همچنین فواصل مختلف طولی و عرضی میزان سرعت را تعیین مینماید، سرعت خودرو متناسب با مسیر مانور تعیین میشود.
بخش چهارم: سیستم کنترل و هدایت
در این بخش مسیر و سرعت مطلوب وارد قانون کنترل توسعه داده میشود. خروجی قانون کنترلی ترمز، گاز و فرمان میباشد و در واقع این سیستم نقش عملی راننده را دارد. به عبارت دیگر بخش اول شامل چشم راننده است، بخش دوم و سوم شامل ذهن راننده است و بخش کنترلر تعقیب از مغز با اعمال ورودیهای مورد نظر کنترلر است. به عبارت دیگر، چیزی که به چشم میآید همین بخش است و بخشهای قبلی به عنوان سیستماتیک اعمال میشود و از دیدگاه افراد غیر متخصص پنهان است. کنترلر طراحی شده در این بخش باید قادر باشد در مسیر طراحی شده را در شرایط مختلف جاده و سرعتهای متفاوت و شرایط نامعین دیگر کنترل نماید. در واقع شرایط مختلف جاده شامل جاده بارانی و یخ زده است. از این رو استفاده از قوانین کنترلی تطبیقی و مقاوم و یا استفاده از سیستمهای هوش مصنوعی در طراحی این کنترلر ضروری است.
جمع بندی:
با توجه ه آنچه گفته شد، مراحل مختلف هدایت و ناوبری یک خودرو خودران شرح داده شد. خودرو خودران جهان بیرون را با استفاده از تجهیزاتی همچون جیپیاس و بینایی ماشین میبیند. داده کاوی برای این دادهها صورت پذیرفته و بر اساس این خروجیها، سیستم تصمیمگیری سرعت، مانور و... را تعیین میکند. مسیر مورد نظر یا سرعت مطلوب خودرو بر اساس سیستم تصمیمگیری و دادههای دیگر، طراحی میشود. در نهایت سیستم هدایت خروجی مورد نیاز برای عملکردهای مختلف را برای نائل آمدن به ورودیهای مطلوب را ایجاد مینماید. تمام این اتفاقات در صدم ثانیه باید اتفاق بیفتد و این نکتهای است که سبب تفاوت بین سیستمهای اتوپایلت خودرو و هواپیما شده است. در هواپیما خلبان چند ثانیه فرصت دارد در صورت عدم امکان هدایت توسط سیستم ناوبری سکان هدایت هواپیما را در دست بگیرد ولی برای خودرو این زمان چند صدم ثانیه است. ادعاهای وجود خودرو خودران که بتواند در تمامی شرایط کاربردی باشد نیز بیشتر مانورهای تبلیغاتی میباشد که توسط شرکتهای خودروسازی مطرح میشود و هنوز فاصله زیادی با یک خودرو تمام خودکار داریم. در این زمینه خودروهای تولید شده توسط تسلا با عنوان قابلیت اتوپایلت شاید به طور کامل سیستمهای خودران نتوانست انگاشت چرا که فاصله زیادی با یک خودرو خودران با قابلیت اطمینان بالا دارد. در این زمینه استفان کاسنر پژوهشگر روانشناسی بخش تلفیق سیستمهای انسانی ناسا معتقد است، خودرو در سال ۲۰۱۷ همانند هواپیما در سال ۱۹۸۳ است! برای عموم مردم، واژهی اتوپایلوت همانند سیستمی مشابه هدایت خودکار هواپیما است در حالی که سیستم تسلا دارای محدودیتهای زیادی است. سیستم اتوپایلوت تسلا بیشتر از این که یک سیستم نیمه خودکار واقعی باشد، شبیه به مجموعهای از سیستمهای کمکراننده ارائه شده توسط دیگر خودرو سازها است.
نظر شما در مورد خودروهای خودران، جایگاه آن در خودروسازی و همچنین ادعاهای و تولید خودران شرکتهای خودروسازی چیست؟