نظرات (0)
تاریخ انتشار : ۱۳۹۵/۸/۲۶
بررسی کلی سیستمهای کنترلی خودرو

در این مقاله از اُتکس به معرفی انواع سیستمهای کنترلی خودرو و توضیحات مختصری ازعملکرد آنها میپردازیم.
افزایش سراسری استفاده از خودروهای کوچک و بزرگ برای صنایع مختلف این نیاز را ایجاد کرده است که خودروسازها به فکر استفاده بهینه از بزرگراهها و منابع سوختی، تامین ایمنی و همچنین راحتی حمل و نقل با کمترین آسیب به محیط زیست باشند. این یک چالش بسیار بزرگ برای توسعه صنعت خودروسازی در سراسر جهان محسوب میشود. برای رسیدن به این هدف خودروها نیازمند توسعه سیستمها و زیرسیستمهای الکترومکانیکی با بهرهگیری از سنسورها، فعالکنندهها و قانون کنترل فیدبک هستند. همچنین لازم به ذکر است که پیشرفت در حالت جامد (الکترونیک)، سنسورها، تکنولوژی رایانهای وکنترل سیستمها در دو دهه گذشته نقش بسیار پر رنگی در توسعه این روند داشته است.
در این مقاله یک نگاه کلی به برخی سیستمهای فیدیک الکترومکانیکی که سبب توسعه و پیشرفت صنعت خودروسازی و همچنین آزمایشگاههای تحقیقاتی خودور شده است، میپردازیم. به طور کلی این مقاله شامل معرفی مختصر موارد زیر میباشد:
سیستم های کمک راننده (DAS)
سیستم کنترل پایداری فعال خودرو
بهبود کیفیت سواری خودرو
راه حل ازدحام ترافیک
اقتصاد سوخت و کاهش گازهای سمی خروجی
سیستمهای کمک راننده
به طور کلی در هر دقیقه یک نفر به دلیل تصادفات رانندگی جان خود را از دست میدهد. همچنین خسارات وارده از طرف تصادفات رانندگی میلیارها دلار هزینه جبران ناپذیر به پیکره جامعه وارد میکند. گزارشات انجمن ملی ایمنی حمل و نقل بزرگراههای ایالات متحده امریکا (NHTSA) نشان داده که به طور تقریبی شش میلیون تصادف با ۳۵ هزار قربانی در بزرگراههای امریکا (گزارش NHTSA سال ۲۰۱۰) رخ میدهد. همچنین این گزارشات حاکی از این بود که عامل اصلی تصادفات فوق (حدود ۹۰ درصد) خطاهای انسانی است. این مسائل چالش بزرگی برای شرکتهای خودروسازی و محققان خودرو بود تا با ایجاد سیستمهایی بتوانند این آمار را کاهش دهند که منجر به تولید سیستمهای کمکراننده شده است.
سیستمهای کمکراننده مختلفی توسط خودروسازان برای کاهش مسئولیت راننده و کاهش تصادفات و تلفات جادهای اتخاذ شده است. مثالهای سیستمهای کمکراننده توسعه داده شده توسط خودروسازها به صورت زیر است:
سیستمهای اجتناب از برخورد که به صورت خودکار موانع را تشخیص داده و با استفاده از هشدار و ترمز به کمک راننده میشتابد.
سیستم کروز کنترل تطبیقی (ACC) که توسعه یافته سیستم کروز کنترل است و با استفاده از سیستم تطبیقی خودرو را با فاصلهای ایمن نسب به خودروهای دیگر در بزرگراهها هدایت میکند.
سیستم هشدار خروج از خط که در صورت خروج خودرو از خط جاده با آژیری به راننده هشدار میدهد.
سیستم نگهدارنده بین دو خط جاده که با استفاده از فرمان فعال (خودکار) کار میکند.
سیستم افزایش بینایی و همچنین سیستم بینایی در شب که با استفاده از مادون قرمز و تکنولوژیهای دیگر موانع فیزیکی و عابرین پیاده را در تاریکی شب تشخیص میدهد.
سیستم پایش شرایط راننده که با تشخیص و ایجاد یک هشدار راننده خوابآلوده را از مانع و همچنین عابر با خبر میسازد.
و همچنین تکنولوژیهای دیگر که سبب رفاه هرچه بیشتر راننده شده و مقداری از مسئولیت رانندگی را بر عهده میگیرد و سبب کاهش تلفات جاده و تراکم ترافیک در جادهها میشود.

سیستم نگهدارنده بین دو خط جاده
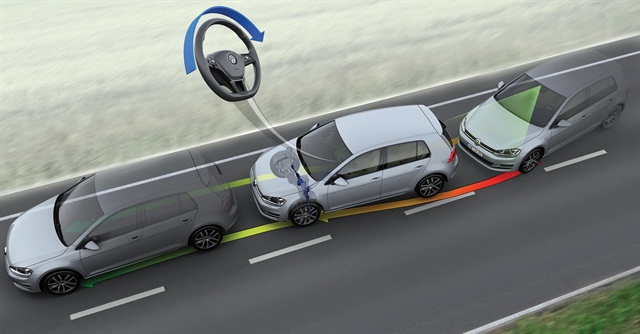
سیستم نگهدارنده بین دو خط جاده

سیستم بینایی در شب

سیستم هشدار خروج از خط
سیستم تشخیص خواب آلودگی و خستگی راننده

سیستم کروز کنترل تطبیقی
سیستم کنترل پایداری فعال خودرو
سیستم کنترل پایداری خودرو با جلوگیری از چرخش بیش از اندازه خودرو در پیچها سبب پایداری چرخشی خودرو میشود. این سیستم امروزه توسط بسیاری از خودروسازها توسعه یافته است. شکل زیر به صورت شماتیک عملکرد سیستم پایداری چرخشی خودرو را نمایش میدهد. همانطور که مشاهده میشود منحنی پایینی منحنیای است که خودرو در حالت جاده خشک (اصطکاک بالا) باید طی کند. در این حالت اصطکاک زیاد جاده سبب تامین نیروهای جانبی مناسب تایر برای طی مسیر منحنی پایینی میشود. در ضرایب اصطکاک پایین یا سرعتهای بالا تحت همان فرمان قبلی خودرو منحنی بالایی را طی میکند. در واقع خودرو به جای طی کردن مسیر پایینی به دلیل نیروهای جانبی کم تایر، مسیر بالایی را طی میکند. وظیه سیستم پایداری جانبی خودرو این است که در حد امکان نرخ چرخش (yaw rate) خودرو را طوری تغییر دهد که خودرو به مسیر منحنی پایینی نزدیک شود. عملا هدایت خودرو در مسیر تعیین شده اولیه غیر ممکن است ولی این تصحیح نرخ چرخش خودرو سبب نزدیک شدن مسیر طی شده توسط خودرو به مسیر مطلوب میشود.
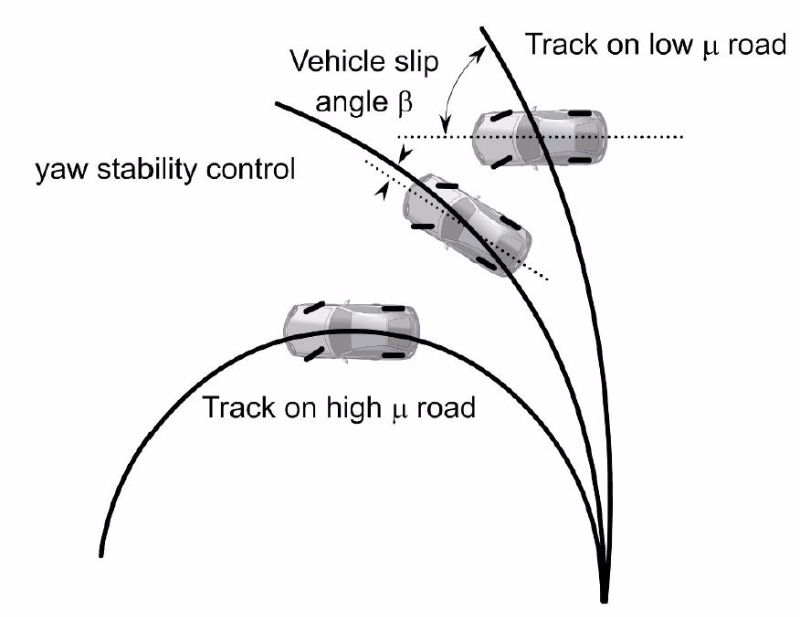
سیستم کنترل پایداری فعال خودرو
بهبود کیفیت سواری خودرو
استفاده از عملگرهای فعال در سیستم تعلیق خودرو سبب افزایش راحتی سواری، بهتر شدن هندلینگ و همچنین افزایش نیروی پیشرانش خودرو میشود که این تکنولوژی از سالیان پیش توسط محققان مختلف توسعه یافته است. سیستم تعلیق تمام فعال خودرو برای خودرو فرمول وان لوتوس در سال ۱۹۸۴ استفاده شده است. برای خودروهای امروزی در بازار جهانی سیستمهای تعلیق نیمه فعال جهت استفاده مردم جهان تعبیه شده است. سیستم تعلیق MagneRide نیمهفعال دلفی (Delphi) برای اولین بار در سال ۲۰۰۲ روی کادیلاک (Seville STS) عرضه شد. همچنین این سیستم تعلیق نیمه فعال امروزه برای همه مدلهای Corvette قابل دسترس است. این سیستم تعلیق با استفاده از کمکفنر مغناطیسی که با سیال رئومغناطیسی کار میکند، ضرایب دمپینگ و سختی سیستم تعلیق را به صورت آنی و برخط تغییر میدهد. سیستم کنترل فیدبک با تغییر خواص کمکفنر کیفیت سواری خوبی را به خودرو میبخشد.
بیشتر سیستمهای تعلیق فعال و نیمهفعال موجود در بازار جهانی خودرو برای تامین هندلینگ خودرو با کاهش غلتش خودرو مورد استفاده واقع میشود.
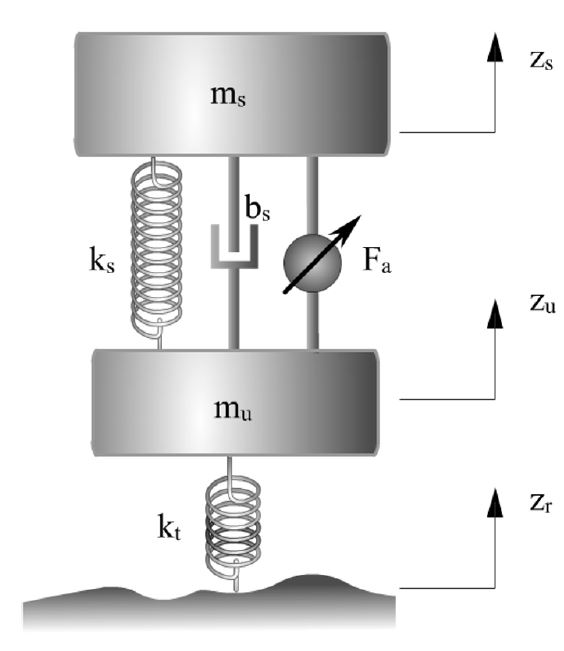
مدل یک چهارم سیستم تعلیق فعال خودرو
راه حل ازدحام ترافیک
تراکم ترافیک در جوامع شهری بسیار زیاد است و پیشبینی شده است که در ده سال اخیر این تراکم بیشتر هم شود. بیش از ۵ میلیارد ساعت به صورت سالیانه در پشت ترافیکهای بزرگراهها تلف میشود. افزایش روزافزون جمعیت و همچنین ساخت آسمانخراشها سبب دشوار شدن گسترش جادهها برای سیستمهای حمل و نقل فردی شده است. از طرفی افزایش ظرفیت حمل و نقل عمومی نیز محدود بوده و امکان گسترش بیشتر آن وجود ندارد. همانطور که ذکر شد حل این مشکل به خودی خود وابسته به شرکتهای خودروسازی نبوده و باید به صورت گسترده در دانشگاههای مختلف توسط محققان مرتبط با صنعت حمل و نقل مورد بررسی قرار گیرد. مثالهایی از این تحقیقات شامل سیستم بزرگراه خودکار، سیستم کروز کنترل تطبیقی با عنوان “traffic friendly” و توسعه یک خودرو باریک (نصف عرض خودرو معمولی) که با استفاده از کنترل کجی (زاویه غلتش خودرو) آن کار میکند، است. این مطالب به صورت کامل در مقالات هفتههای آینده اُتکس پیگیری خواهد شد.

ارتباط میان خودروها برای ایجاد بزرگراه هوشمند
ترکیب موتورسیکلت و خودرو برای رسیدن به خودرو با نصف عرض معمول
اقتصاد سوخت و کاهش گازهای سمی خروجی
استانداردهای اروپا، ژاپن و ایالات متحده امریکا بر کاهش گازهای خروجی از خودرو پافشاری بسیاری دارند. بر نتیجه این پافشاری، در سال ۲۰۰۵ خروج گاز هیدروکربن نسب به سال ۱۹۷۰ دو درصد کاهش یافته بود. در این سال میزان کربن دی اکسید نسبت به سال ۱۹۷۰، ۱۰ درصد و همچنین میزان اکسید نیتروژن به میزان ۷ درصد کاهش یافته بود که این نمایانگر سیاستهای خودروسازها در کاهش آلودگی برای دهه پیش بوده است. کاهش این گازها ارتباط تنگاتنگی با اقتصاد سوخت دارد. خودروسازها و محققان در زمینه خودرو با ایجاد سیستمهای کنترل فیدبک گامهای مهمی برای پیشربرد این هدف برداشتهاند. این سیستمهای توسعه یافته شده شامل سیستم بازچرخانی گاز اگزوز (EGR)، سیستم سوخترسانی انژکتوری، موتور احتراقی پیستون آزاد (camless-free-valve piston engine)، موتورهای اشتعال تراکمی سوخت همگن (HCCI) و توسعه سیستمهای سنسورینگ برای پایش وضعیت گازهای خروجی از خودرو است.
امروزه برای فراهم آوردن این استانداردها و به صفر رساندن گازهای خروجی خودروها، خودروسازها و محققان به سمت خودروهای هیدبریدی، پلاگین هیبریدی خودرو و همچنین خودروهای الکتریکی تمایل پیدا کردهاند. امروزه با توجه با افزایش تکنولوژی تولید باتریهای مختلف و همچنین کاهش قیمتهای مربوط به تولید و عرضه آن، خودروهای هیبریدی و الکتریکی بیش از پیش مورد توجه قرار گرفتهاند.
برچسبها
نظرات
نظر خاصی ندادن دوستان شما اولین نفر باش